Connecting multiple batteries with Battery Management Systems (BMS) to a solar inverter through a CAN bus can be a bit complex but is an effective way to monitor and control the battery system efficiently. Here’s a step-by-step explanation of how to do this, particularly when you are using 4 batteries of 5 kWh in parallel with a solar inverter.
Step-by-Step Guide:
1. Understanding the Components:
– Batteries: You have 4 batteries, each with a Battery Management System (BMS). The BMS monitors battery parameters (voltage, current, temperature, etc.) and communicates with the inverter.
– Solar Inverter: The inverter typically has a communication port, often supporting CAN (Controller Area Network) or RS485 communication protocols to manage battery charging, discharging, and other functions.
– CAN Bus: This is a communication system that allows multiple devices (such as the BMS of each battery and the inverter) to communicate over a single bus line.
2. Check Compatibility:
Ensure that:
– The batteries’ BMS support CAN bus communication.
– The inverter also has a CAN bus communication port (usually marked as CAN or something similar on the inverter).
3. Wiring the Batteries in Parallel:
To extend the backup time, you’ll wire the 4 batteries in parallel. This increases the available capacity (Ah) while keeping the voltage the same.
– Connect the positive terminals of all 4 batteries together.
– Connect the negative terminals of all 4 batteries together.
– Make sure the wiring is balanced and each battery has identical connections to the inverter, using the same gauge cables and lengths to ensure even power distribution.
4. Wiring the CAN Bus Network:
The CAN bus is designed for multiple devices to communicate on the same network using differential signals. Here’s how to wire the batteries to the inverter via CAN bus:
– CAN High (CAN H) and CAN Low (CAN L) are the two wires used for CAN communication. Each battery and the inverter will have CAN H and CAN L connections.
– Daisy-chain the CAN bus wiring:
– Connect the CAN H of the first battery’s BMS to the CAN H of the second battery’s BMS.
– Continue connecting CAN H in a daisy-chain fashion to the third and fourth batteries, and finally to the CAN H port of the inverter.
– Similarly, connect CAN L for all batteries in the same daisy-chain fashion and finally to the inverter’s CAN L port.
– Termination Resistors: CAN bus requires termination resistors (usually 120 Ohms) at the two extreme ends of the bus. Typically:
– The inverter might already have a built-in termination resistor.
– Ensure that the last battery in the chain has a termination resistor between CAN H and CAN L. Some BMS systems have a built-in termination resistor, while others require you to add one manually.
5. Configuring the Communication:
– Battery Addressing: Some systems require you to set the BMS IDs or addresses of each battery so that the inverter can identify and communicate with each one correctly. This can usually be done through a DIP switch or software configuration, depending on the BMS manufacturer.
– CAN Communication Parameters: Ensure that all devices on the CAN bus (BMS and inverter) are set to the same baud rate and communication settings (check the user manuals for your inverter and batteries for the correct parameters).
6. Connect the CAN Bus to the Inverter:
– After wiring the CAN bus network and ensuring correct addressing and termination, plug the CAN bus into the inverter’s communication port.
– Some inverters might require you to select the battery type or configure the communication protocol in the inverter settings to recognize the connected batteries. Refer to your inverter manual for the correct configuration procedure.
7. Testing the Setup:
– Power up the system and check if the inverter recognizes all batteries.
– The inverter should now be able to communicate with all 4 batteries over the CAN bus, allowing it to monitor battery health, SOC (State of Charge), and control charging/discharging parameters accordingly.
– Ensure there are no communication errors in the inverter’s display or monitoring software. If you encounter issues, check the wiring and CAN bus configuration (including termination resistors).
8. Monitoring and Balancing:
– The BMS of each battery will handle individual battery balancing (voltage, temperature, etc.), and the inverter will manage the overall charging and discharging of the battery system.
– If your inverter supports it, you can use monitoring software to track the performance of each battery and the whole system via the CAN bus communication.
Important Considerations:
– Inverter Settings: Some inverters allow for more detailed configuration in terms of communication protocols. Ensure that the inverter is set up to communicate via CAN bus with the correct battery settings.
– Battery Capacity and Voltage Matching: Ensure all batteries have the same nominal voltage and capacity (5 kWh in your case) to avoid imbalances during operation.
This method ensures that all four batteries work together efficiently, extending your backup time while being properly managed by the inverter.
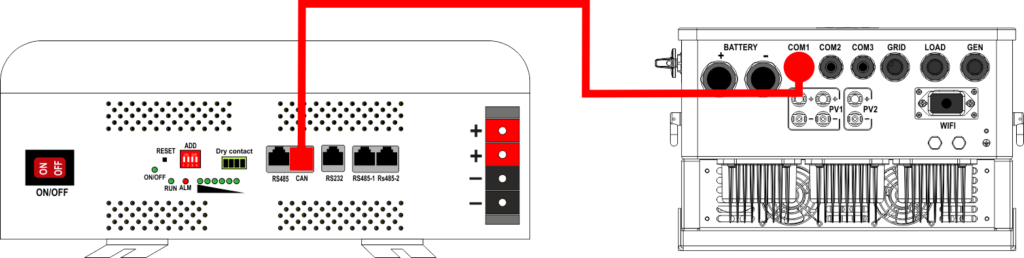
CAN BUS Connections:
To connect multiple batteries via the CAN ports, you will need to make straight-through connections (jumpers) for the CAN H (High) and CAN L (Low) ports across all devices (batteries and inverter) in the network.
Here’s what you will need:
1. Straight-through CAN Cables: These will connect CAN H to CAN H and CAN L to CAN L between each battery and the inverter.
2. Daisy-Chaining:
– CAN H of Battery 1 connects to CAN H of Battery 2.
– CAN L of Battery 1 connects to CAN L of Battery 2.
– Continue the same for all the batteries.
– The last battery’s CAN H and CAN L will then connect to the inverter’s CAN H and CAN L.
3. Termination Resistors: As mentioned earlier, ensure there are 120 Ohm termination resistors at the two ends of the CAN bus network (usually one at the inverter and one at the last battery). Some devices may have built-in termination resistors; if not, you’ll need to add them manually.
By using straight connectors or jumper wires, you can effectively link all the batteries and the inverter on the same CAN bus network. This allows the inverter to communicate with all batteries via the CAN protocol for battery management.